UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding

PubDate: Nov 2023
Teams: 1Shanghai Jiao Tong University2Shanghai AI Laboratory, Pujiang Lab3University of New Hampshire
Writers: Han Xue, Yutong Li, Wenqiang Xu, Huanyu Li, Dongzhe Zheng, Cewu Lu
PDF: UniFolding: Towards Sample-efficient, Scalable, and Generalizable Robotic Garment Folding
Abstract
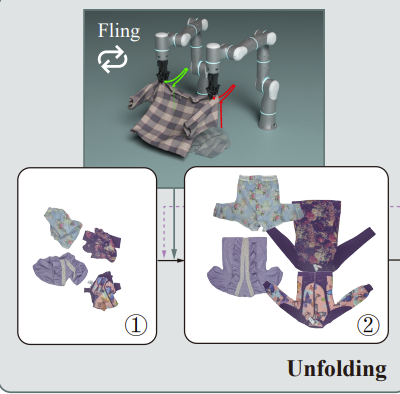
This paper explores the development of UniFolding, a sample-efficient, scalable, and generalizable robotic system for unfolding and folding various garments. UniFolding employs the proposed UFONet neural network to integrate unfolding and folding decisions into a single policy model that is adaptable to different garment types and states. The design of UniFolding is based on a garment’s partial point cloud, which aids in generalization and reduces sensitivity to variations in texture and shape. The training pipeline prioritizes low-cost, sample-efficient data collection. Training data is collected via a human-centric process with offline and online stages. The offline stage involves human unfolding and folding actions via Virtual Reality, while the online stage utilizes human-in-the-loop learning to fine-tune the model in a real-world setting. The system is tested on two garment types: long-sleeve and short-sleeve shirts. Performance is evaluated on 20 shirts with significant variations in textures, shapes, and materials. More experiments and videos can be found in the supplementary materials and on the website: this https URL