Hetero-contact microstructure to program discerning tactile interactions for virtual reality

PubDate: June 2019
Teams: Nanyang Technological University;Fuzhou University;Beijing Institute of Technology
Writers:Xinqin Liao;Weitao Song;Xiangyu Zhang;Hongbing Zhan;Yue Liu;Yongtian Wang;Yuanjin Zheng
PDF: Hetero-contact microstructure to program discerning tactile interactions for virtual reality
Abstract
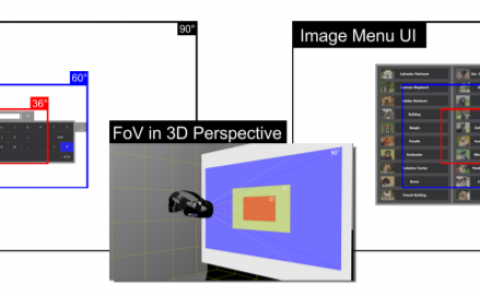
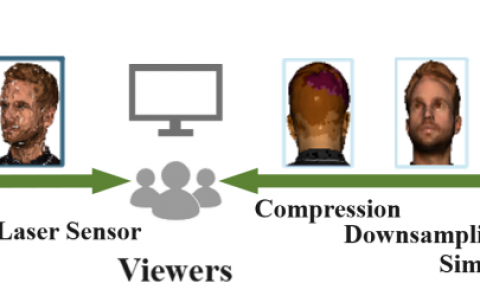
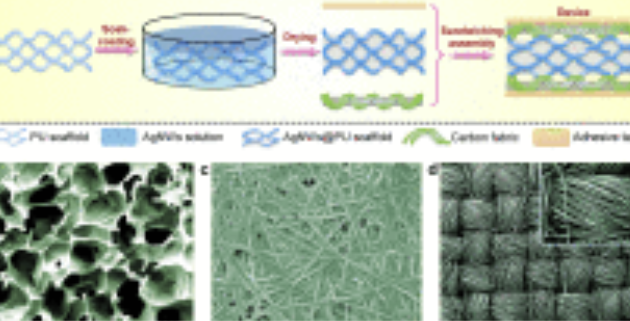
Helping to reconstruct and restore tactile perception motivates the continuous development of functional materials, sensing structures, and manufacturing strategies. Coding and use of mechanotransduction signals from artificial tactile perception make a vital contribution to provide tactile feedback for robots, prosthetics, and rehabilitation therapy. Here we propose a hetero-contact microstructure (HeCM) to fabricate tactile sensor by using silver nanowires@polyurethane scaffold combined with layered carbon fabric. The synergistically perceiving of the HeCM enables the mechanosensational range of tactile sensor to be programmatically and significantly enhanced by >100% compared to the one of the common counterpart. The as-designed sensor characterizes high sensitivity, fast response time, and reproducible electromechanical properties to identify static and dynamic external pressure changes. Actual fingertip events can be converted into visual or audio interactive feedback in virtual reality by the intelligent sensor, demonstrating the feasibility and practicality of design concept and great potential of the sensor for human-interactive system.