Mutual Human Actuation

Title: Mutual Human Actuation
Teams: Hasso Plattner Institute
Writers: Lung-Pan Cheng, Sebastian Marwecki, Patrick Baudisch
Publication date: October, 2017
Abstract
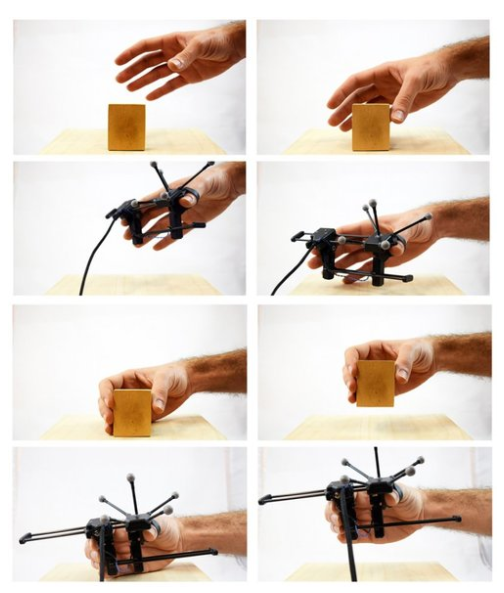
Human actuation is the idea of using people to provide largescale force feedback to users. The Haptic Turk system, for example, used four human actuators to lift and push a virtual reality user; TurkDeck used ten human actuators to place and animate props for a single user. While the experience of human actuators was decent, it was still inferior to the experience these people could have had, had they participated as a user. In this paper, we address this issue by making everyone a user. We introduce mutual human actuation, a version of human actuation that works without dedicated human actuators. The key idea is to run pairs of users at the same time and have them provide human actuation to each other. Our system, Mutual Turk, achieves this by (1) offering shared props through which users can exchange forces while obscuring the fact that there is a human on the other side, and (2) synchronizing the two users’ timelines such that their way of manipulating the shared props is consistent across both virtual worlds. We demonstrate mutual human actuation with an example experience in which users pilot kites though storms, tug fish out of ponds, are pummeled by hail, battle monsters, hop across chasms, push loaded carts, and ride in moving vehicles.