PuPoP: Pop-up Prop on Palm for Virtual Reality

Title: PuPoP: Pop-up Prop on Palm for Virtual Reality
Teams: National Taiwan University;National Chiao Tung University
Writers: Shan-Yuan Teng;Tzu-Sheng Kuo;Chi Wang;Chi-huan Chiang;Da-Yuan Huang;Liwei Chan;Bing-Yu Chen
Publication date: October 2018
Abstract
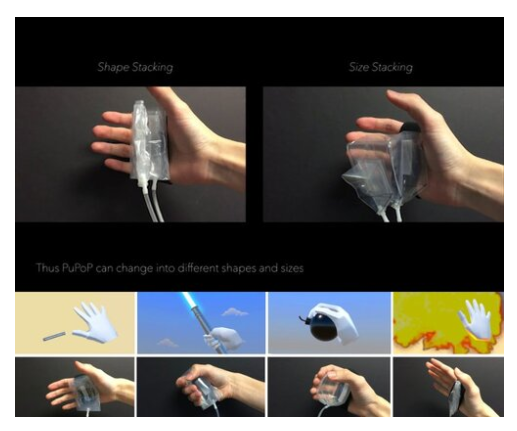
The sensation of being able to feel the shape of an object when grasping it in Virtual Reality (VR) enhances a sense of presence and the ease of object manipulation. Though most prior works focus on force feedback on fingers, the haptic emulation of grasping a 3D shape requires the sensation of touch using the entire hand. Hence, we present Pop-up Prop on Palm (PuPoP), a light-weight pneumatic shape-proxy interface worn on the palm that pops several airbags up with predefined primitive shapes for grasping. When a user’s hand encounters a virtual object, an airbag of appropriate shape, ready for grasping, is inflated by way of the use of air pumps; the airbag then deflates when the object is no longer in play. Since PuPoP is a physical prop, it can provide the full sensation of touch to enhance the sense of realism for VR object manipulation. For this paper, we first explored the design and implementation of PuPoP with multiple shape structures. We then conducted two user studies to further understand its applicability. The first study shows that, when in conflict, visual sensation tends to dominate over touch sensation, allowing a prop with a fixed size to represent multiple virtual objects with similar sizes. The second study compares PuPoP with controllers and free-hand manipulation in two VR applications. The results suggest that utilization of dynamically-changing PuPoP, when grasped by users in line with the shapes of virtual objects, enhances enjoyment and realism. We believe that PuPoP is a simple yet effective way to convey haptic shapes in VR.