Haptic Interface Based on Optical Fiber Force Myography Sensor

Note: We don't have the ability to review paper
PubDate: August 2019
Teams: University of Campinas
Writers: Eric Fujiwara; Yu Tzu Wu; Matheus K. Gomes; Willian H. A. Silva; Carlos K. Suzuki
PDF: Haptic Interface Based on Optical Fiber Force Myography Sensor
Abstract
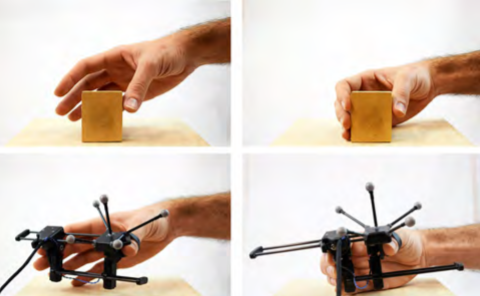
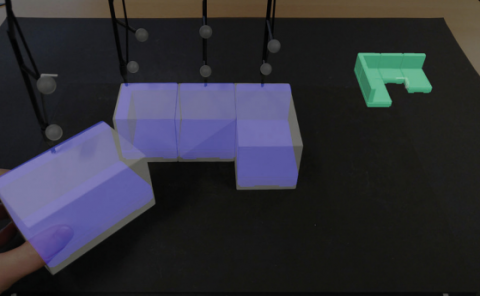
A haptic grasp interface based on the force myography technique is reported. The hand movements and forces during the object manipulation are assessed by an optical fiber sensor attached to the forearm, so the virtual contact is computed, and the reaction forces are delivered to the subject by graphical and vibrotactile feedbacks. The system was successfully tested for different objects, providing a non-invasive and realistic approach for applications in virtual-reality environments.