Propagation of Joint Space Quantization Error to Operational Space Coordinates and Their Derivatives

Title: Propagation of Joint Space Quantization Error to Operational Space Coordinates and Their Derivatives
Teams: Facebook
Writers: Nick Colonnese, Allison M. Okamura
Publication date: September 24, 2017
Abstract
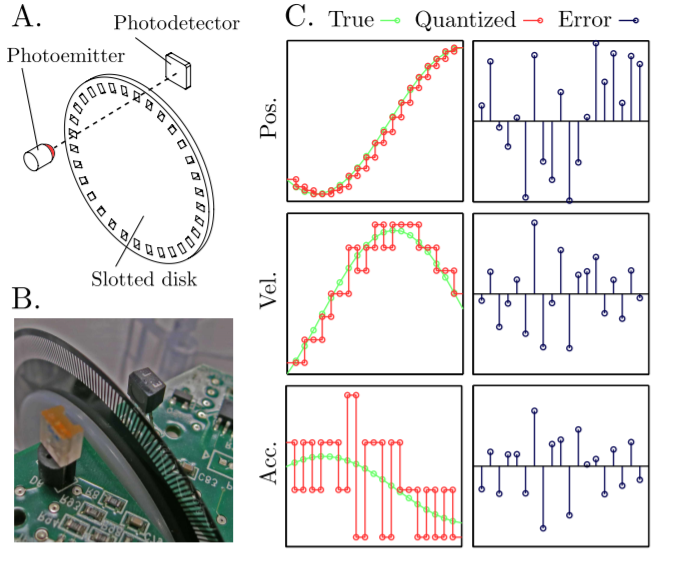
Many robotic systems achieve position sensing through the use of optical encoders that specify the position of a joint to a certain resolution. Encoders effectively quantize joint space coordinates and introduce position measurement error in the process. This error propagates to operational space coordinates, limiting end-effector position and orientation resolution, and also to joint and operational space coordinate derivatives, manifesting as noise that can vitiate the signal. In this paper, we characterize encoder error in a robotic system. Given encoder specifications, robot kinematics, and discrete transfer functions mapping coordinates to their derivatives, we describe the propagation of quantization error on joint space coordinates to operational space coordinates, joint space coordinate derivatives, and operational space coordinate derivatives. We establish two results for quantization error. The first is a general result useful for establishing worst-case bounds. The second models each quantization as independent additive pseudo quantization noise (PQN) for which stochastic metrics on the error are determined. Experimental data gathered from a Phantom Premium robot/haptic device supports the analytical results.