SliceNet: deep dense depth estimation from a single indoor panorama using a slice-based representation

PubDate: June 2021
Teams: Visual Computing,CRS4;CSE;
Writers: Giovanni Pintore;Marco Agus;Eva Almansa;Jens Schneider;Enrico Gobbetti
Abstract
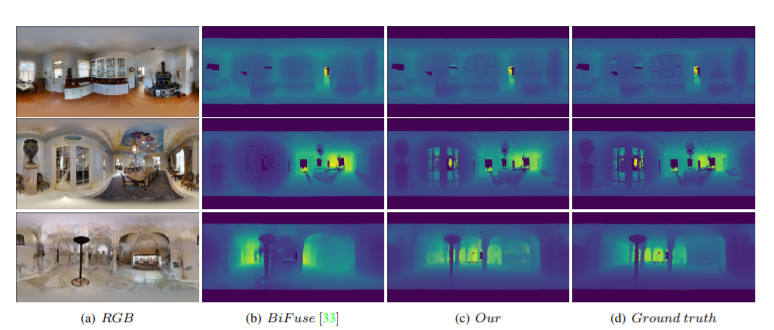
We introduce a novel deep neural network to estimate a depth map from a single monocular indoor panorama. The network directly works on the equirectangular projection, exploiting the properties of indoor 360◦ images. Starting from the fact that gravity plays an important role in the design and construction of man-made indoor scenes, we propose a compact representation of the scene into vertical slices of the sphere, and we exploit long- and short-term relationships among slices to recover the equirectangular depth map. Our design makes it possible to maintain highresolution information in the extracted features even with a deep network. The experimental results demonstrate that our method outperforms current state-of-the-art solutions in prediction accuracy, particularly for real-world data.
