Real-Time Sphere Sweeping Stereo from Multiview Fisheye Images

PubDate: June 2021
Teams: KAIST
Writers: Andreas Meuleman Hyeonjoong Jang Daniel S. Jeon Min H. Kim
PDF: Real-Time Sphere Sweeping Stereo from Multiview Fisheye Images
Abstract
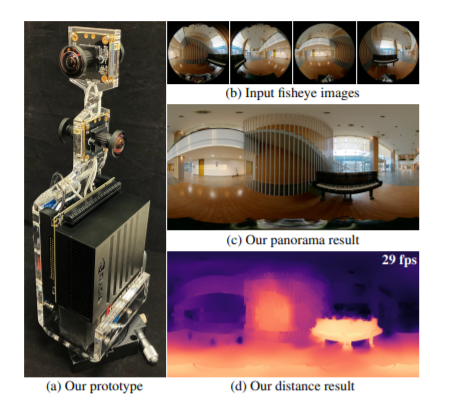
A set of cameras with fisheye lenses have been used to capture a wide field of view. The traditional scan-line stereo algorithms based on epipolar geometry are directly inapplicable to this non-pinhole camera setup due to optical characteristics of fisheye lenses; hence, existing complete 360◦ RGB-D imaging systems have rarely achieved realtime performance yet. In this paper, we introduce an efficient sphere-sweeping stereo that can run directly on multiview fisheye images without requiring additional spherical rectification. Our main contributions are: First, we introduce an adaptive spherical matching method that accounts for each input fisheye camera’s resolving power concerning spherical distortion. Second, we propose a fast inter-scale bilateral cost volume filtering method that refines distance in noisy and textureless regions with optimal complexity of O(n). It enables real-time dense distance estimation while preserving edges. Lastly, the fisheye color and distance images are seamlessly combined into a complete 360◦ RGB-D image via fast inpainting of the dense distance map. We demonstrate an embedded 360◦ RGB-D imaging prototype composed of a mobile GPU and four fisheye cameras. Our prototype is capable of capturing complete 360◦ RGB-D videos with a resolution of two megapixels at 29 fps. Results demonstrate that our real-time method outperforms
traditional omnidirectional stereo and learning-based omnidirectional stereo in terms of accuracy and performance.