Model Mediated Teleoperation with a Hand-Arm Exoskeleton in Long Time Delays Using Reinforcement Learning

PubDate: Jul 2021
Teams: German Aerospace Center;Hamburg University;Technical University of Munich
Writers: Hadi Beik-Mohammadi, Matthias Kerzel, Benedikt Pleintinger, Thomas Hulin, Philipp Reisich, Annika Schmidt, Aaron Pereira, Stefan Wermter, Neal Y. Lii
Abstract
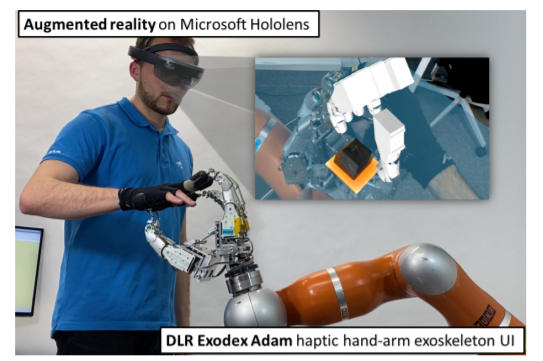
Telerobotic systems must adapt to new environmental conditions and deal with high uncertainty caused by long-time delays. As one of the best alternatives to human-level intelligence, Reinforcement Learning (RL) may offer a solution to cope with these issues. This paper proposes to integrate RL with the Model Mediated Teleoperation (MMT) concept. The teleoperator interacts with a simulated virtual environment, which provides instant feedback. Whereas feedback from the real environment is delayed, feedback from the model is instantaneous, leading to high transparency. The MMT is realized in combination with an intelligent system with two layers. The first layer utilizes Dynamic Movement Primitives (DMP) which accounts for certain changes in the avatar environment. And, the second layer addresses the problems caused by uncertainty in the model using RL methods. Augmented reality was also provided to fuse the avatar device and virtual environment models for the teleoperator. Implemented on DLR’s Exodex Adam hand-arm haptic exoskeleton, the results show RL methods are able to find different solutions when changes are applied to the object position after the demonstration. The results also show DMPs to be effective at adapting to new conditions where there is no uncertainty involved.