Altering Perceived Softness of Real Rigid Objects by Restricting Fingerpad Deformation

PubDate: October 2021
Teams: University of Chicago
Writers: Yujie Tao;Shan-Yuan Teng;Pedro Lopes
PDF: Altering Perceived Softness of Real Rigid Objects by Restricting Fingerpad Deformation

Abstract
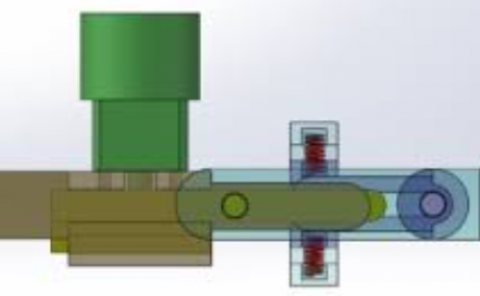
We propose a haptic device that alters the perceived softness of real rigid objects without requiring to instrument the objects. Instead, our haptic device works by restricting the user’s fingerpad lateral deformation via a hollow frame that squeezes the sides of the fingerpad. This causes the fingerpad to become bulgier than it originally was—when users touch an object’s surface with their now-restricted fingerpad, they feel the object to be softer than it is. To illustrate the extent of softness illusion induced by our device, touching the tip of a wooden chopstick will feel as soft as a rubber eraser. Our haptic device operates by pulling the hollow frame using a motor. Unlike most wearable haptic devices, which cover up the user’s fingerpad to create force sensations, our device creates softness while leaving the center of the fingerpad free, which allows the users to feel most of the object they are interacting with. This makes our device a unique contribution to altering the softness of everyday objects, creating “buttons” by softening protrusions of existing appliances or tangibles, or even, altering the softness of handheld props for VR. Finally, we validated our device through two studies: (1) a psychophysics study showed that the device brings down the perceived softness of any object between 50A-90A to around 40A (on Shore A hardness scale); and (2) a user study demonstrated that participants preferred our device for interactive applications that leverage haptic props, such as making a VR prop feel softer or making a rigid 3D printed remote control feel softer on its button.