BEHAVE: Dataset and Method for Tracking Human Object Interactions

PubDate: Apr 2022
Teams: University of Tubingen;Max Planck Institute for Informatics;Google Research
Writers: Bharat Lal Bhatnagar, Xianghui Xie, Ilya A. Petrov, Cristian Sminchisescu, Christian Theobalt, Gerard Pons-Moll
PDF: BEHAVE: Dataset and Method for Tracking Human Object Interactions
Abstract
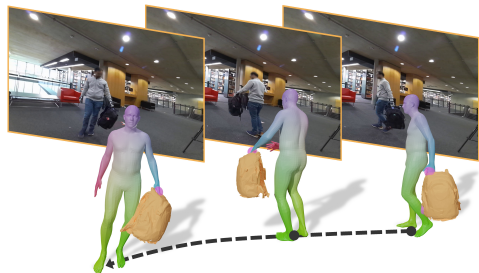
Modelling interactions between humans and objects in natural environments is central to many applications including gaming, virtual and mixed reality, as well as human behavior analysis and human-robot collaboration. This challenging operation scenario requires generalization to vast number of objects, scenes, and human actions. Unfortunately, there exist no such dataset. Moreover, this data needs to be acquired in diverse natural environments, which rules out 4D scanners and marker based capture systems. We present BEHAVE dataset, the first full body human- object interaction dataset with multi-view RGBD frames and corresponding 3D SMPL and object fits along with the annotated contacts between them. We record around 15k frames at 5 locations with 8 subjects performing a wide range of interactions with 20 common objects. We use this data to learn a model that can jointly track humans and objects in natural environments with an easy-to-use portable multi-camera setup. Our key insight is to predict correspondences from the human and the object to a statistical body model to obtain human-object contacts during interactions. Our approach can record and track not just the humans and objects but also their interactions, modeled as surface contacts, in 3D. Our code and data can be found at: this http URL