InLoc: Indoor Visual Localization with Dense Matching and View Synthesis

Title: InLoc: Indoor Visual Localization with Dense Matching and View Synthesis
Teams: Microsoft
Writers: Hajime Taira Masatoshi Okutomi Torsten Sattler Mircea Cimpoi Marc Pollefeys Josef Sivic Tomas Pajdla Akihiko Torii
Publication date: April 2018
Abstract
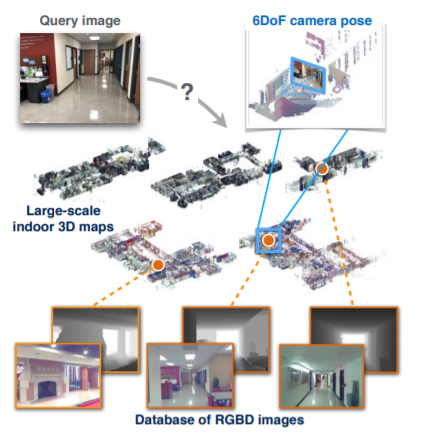
We seek to predict the 6 degree-of-freedom (6DoF) pose of a query photograph with respect to a large indoor 3D map. The contributions of this work are three-fold. First, we develop a new large-scale visual localization method targeted for indoor environments. The method proceeds along three steps: (i) efficient retrieval of candidate poses that ensures scalability to large-scale environments, (ii) pose estimation using dense matching rather than local features to deal with textureless indoor scenes, and (iii) pose verification by virtual view synthesis to cope with significant changes in viewpoint, scene layout, and occluders. Second, we collect a new dataset with reference 6DoF poses for large-scale indoor localization. Query photographs are captured by mobile phones at a different time than the reference 3D map, thus presenting a realistic indoor localization scenario. Third, we demonstrate that our method significantly outperforms current state-of-the-art indoor localization approaches on this new challenging data.