Virtual Reality via Object Poses and Active Learning: Realizing Telepresence Robots with Aerial Manipulation Capabilities

PubDate: Oct 2022
Teams: German Aerospace Center (DLR);Karlsruhe Institute of Technology (KIT);University of Twente (UT);Technical University of Munich
Writers: Jongseok Lee, Ribin Balachandran, Konstantin Kondak, Andre Coelho, Marco De Stefano, Matthias Humt, Jianxiang Feng, Tamim Asfour, Rudolph Triebel
Abstract
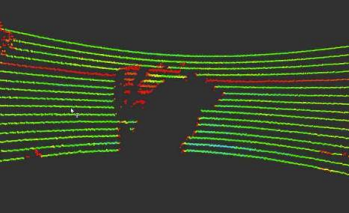
This article presents a novel telepresence system for advancing aerial manipulation in dynamic and unstructured environments. The proposed system not only features a haptic device, but also a virtual reality (VR) interface that provides real-time 3D displays of the robot’s workspace as well as a haptic guidance to its remotely located operator. To realize this, multiple sensors namely a LiDAR, cameras and IMUs are utilized. For processing of the acquired sensory data, pose estimation pipelines are devised for industrial objects of both known and unknown geometries. We further propose an active learning pipeline in order to increase the sample efficiency of a pipeline component that relies on Deep Neural Networks (DNNs) based object detection. All these algorithms jointly address various challenges encountered during the execution of perception tasks in industrial scenarios. In the experiments, exhaustive ablation studies are provided to validate the proposed pipelines. Methodologically, these results commonly suggest how an awareness of the algorithms’ own failures and uncertainty (“introspection”) can be used tackle the encountered problems. Moreover, outdoor experiments are conducted to evaluate the effectiveness of the overall system in enhancing aerial manipulation capabilities. In particular, with flight campaigns over days and nights, from spring to winter, and with different users and locations, we demonstrate over 70 robust executions of pick-and-place, force application and peg-in-hole tasks with the DLR cable-Suspended Aerial Manipulator (SAM). As a result, we show the viability of the proposed system in future industrial applications.