Configuration-Based Optimization for Virtual Hand Haptic Simulation

PubDate: Aug 2022
Teams: Chinese Academy of Sciences;Beihang University; Worcester Polytechnic Institute
Writers: Qianqian Tong; Qiong Wang; Yingkui Zhang; Xiangyun Liao; Wenxuan Wei; Yuru Zhang; Jing Xiao; Dangxiao Wang
PDF: Configuration-Based Optimization for Virtual Hand Haptic Simulation
Abstract
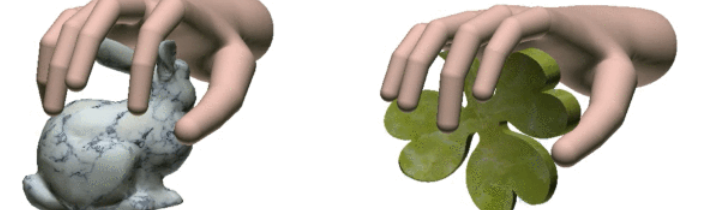
Interacting with virtual objects via haptic feedback using the user’s hand directly (virtual hand haptic interaction) provides a natural and immersive way to explore the virtual world. It remains a challenging topic to achieve 1 kHz stable virtual hand haptic simulation with no penetration amid hundreds of hand-object contacts. In this paper, we advocate decoupling the high-dimensional optimization problem of computing the graphic-hand configuration, and progressively optimizing the configuration of the graphic palm and fingers, yielding a decoupled-and-progressive optimization framework. We also introduce a method for accurate and efficient hand-object contact simulation, which constructs a virtual hand consisting of a sphere-tree model and five articulated cone frustums, and adopts a configuration-based optimization algorithm to compute the graphic-hand configuration under nonpenetration contact constraints. Experimental results show both high update rate and stability for a variety of manipulation behaviors. Nonpenetration between the graphic hand and complex-shaped objects can be maintained under diverse contact distributions, and even for frequent contact switches. The update rate of the haptic simulation loop exceeds 1 kHz for the whole-hand interaction with about 250 contacts.