Instant 3D Photography

Title: Instant 3D Photography
Teams: Facebook
Writers: Peter Hedman, Johannes Kopf
Publication date: July 30, 2018
Abstract
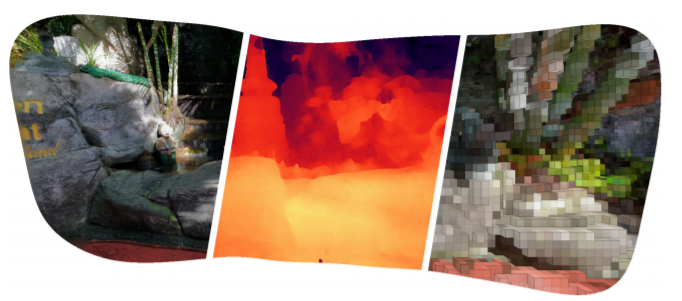
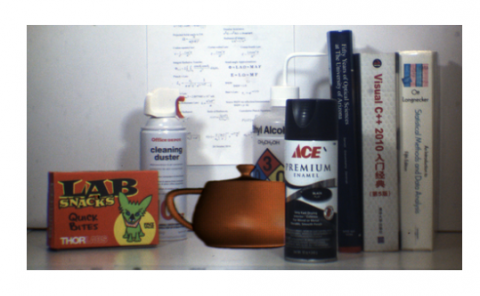
We present an algorithm for constructing 3D panoramas from a sequence of aligned color-and-depth image pairs. Such sequences can be conveniently captured using dual lens cell phone cameras that reconstruct depth maps from synchronized stereo image capture. Due to the small baseline and resulting triangulation error the depth maps are considerably degraded and contain low-frequency error, which prevents alignment using simple global transformations. We propose a novel optimization that jointly estimates the camera poses as well as spatially-varying adjustment maps that are applied to deform the depth maps and bring them into good alignment. When fusing the aligned images into a seamless mosaic we utilize a carefully designed data term and the high quality of our depth alignment to achieve two orders of magnitude speedup w.r.t. previous solutions that rely on discrete optimization by removing the need for label smoothness optimization. Our algorithm processes about one input image per second, resulting in an end-to-end runtime of about one minute for mid-sized panoramas. The final 3D panoramas are highly detailed and can be viewed with binocular and head motion parallax in VR.