Toward Practical Monocular Indoor Depth Estimation

PubDate: June 2022
Teams: Meta Reality Labs, University of Southern California
Writers: Cho-Ying Wu, Jialiang Wang, Michael Hall, Ulrich Neumann, Shuochen Su
PDF: Toward Practical Monocular Indoor Depth Estimation
Abstract
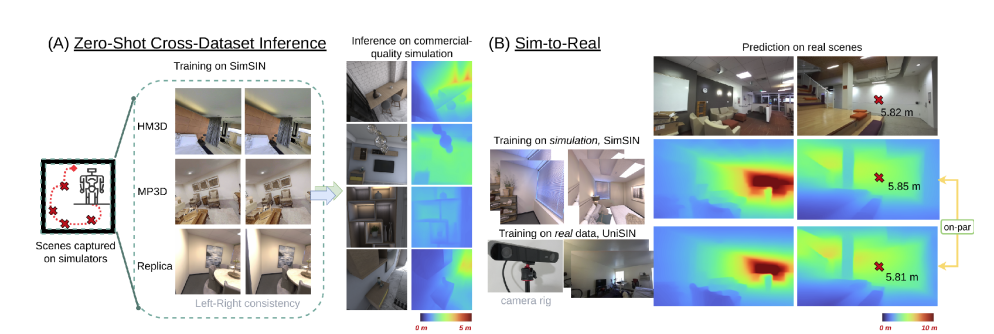
The majority of prior monocular depth estimation methods without groundtruth depth guidance focus on driving scenarios. We show that such methods generalize poorly to unseen complex indoor scenes, where objects are cluttered and arbitrarily arranged in the near field. To obtain more robustness, we propose a structure distillation approach to learn knacks from an off-the-shelf relative depth estimator that produces structured but metric-agnostic depth. By combining structure distillation with a branch that learns metrics from left-right consistency, we attain structured and metric depth for generic indoor scenes and make inferences in real-time. To facilitate learning and evaluation, we collect SimSIN, a dataset from simulation with thousands of environments, and UniSIN, a dataset that contains about 500 real scan sequences of generic indoor environments. We experiment in both sim-to-real and real-to-real settings, and show improvements, as well as in downstream applications using our depth maps. This work provides a full study, covering methods, data, and applications aspects.
