Generative AI-empowered Simulation for Autonomous Driving in Vehicular Mixed Reality Metaverses

PubDate: Feb 2023
Teams: Peking University;Guangdong University of Technology;University of Houston
Writers: Minrui Xu, Dusit Niyato, Junlong Chen, Hongliang Zhang, Jiawen Kang, Zehui Xiong, Shiwen Mao, Zhu Han
PDF: Generative AI-empowered Simulation for Autonomous Driving in Vehicular Mixed Reality Metaverses
Abstract
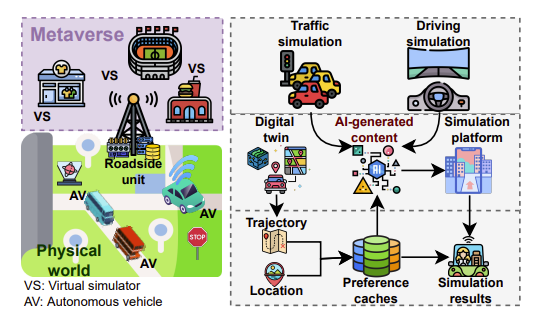
In the vehicular mixed reality (MR) Metaverse, the distance between physical and virtual entities can be overcome by fusing the physical and virtual environments with multi-dimensional communications in autonomous driving systems. Assisted by digital twin (DT) technologies, connected autonomous vehicles (AVs), roadside units (RSU), and virtual simulators can maintain the vehicular MR Metaverse via digital simulations for sharing data and making driving decisions collaboratively. However, large-scale traffic and driving simulation via realistic data collection and fusion from the physical world for online prediction and offline training in autonomous driving systems are difficult and costly. In this paper, we propose an autonomous driving architecture, where generative AI is leveraged to synthesize unlimited conditioned traffic and driving data in simulations for improving driving safety and traffic efficiency. First, we propose a multi-task DT offloading model for the reliable execution of heterogeneous DT tasks with different requirements at RSUs. Then, based on the preferences of AV’s DTs and collected realistic data, virtual simulators can synthesize unlimited conditioned driving and traffic datasets to further improve robustness. Finally, we propose a multi-task enhanced auction-based mechanism to provide fine-grained incentives for RSUs in providing resources for autonomous driving. The property analysis and experimental results demonstrate that the proposed mechanism and architecture are strategy-proof and effective, respectively.