Seamless-walk: natural and comfortable virtual reality locomotion method with a high-resolution tactile sensor

PubDate: Apr 2023
Teams: Gwangju Institute of Science and Technology (GIST) ;MIT CSAIL
Writers: Yunho Choi, Dong-Hyeok Park, Sungha Lee, Isaac Han, Ecehan Akan, Hyeon-Chang Jeon, Yiyue Luo, SeungJun Kim, Wojciech Matusik, Daniela Rus & Kyung-Joong Kim
Abstract
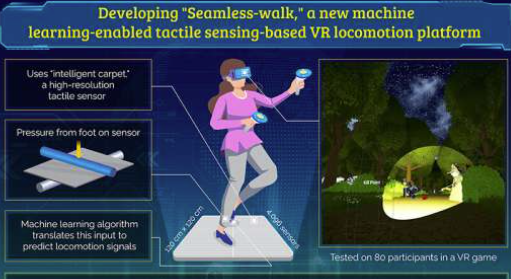
Efficient locomotion methods have been proposed to compensate for the limited space in real-world environments, and such methods offer users more immersive and natural experiences in relatively large virtual environments. The foot-based locomotion method is one of the best options for implementing natural locomotion using foot movement as an input. However, existing foot-based locomotion methods force users to wear equipment or take a video of the user’s body. These actions can cause discomfort, unnatural feelings, or privacy problems. Thus, we propose a Seamless-walk system that can seamlessly translate a real-world gait action to locomotion signals using a high-resolution tactile carpet sensor without requiring wearable equipment. The proposed method captures and analyzes high-resolution footprint information using a machine learning technique and calculates the user’s movement direction and speed in a real-time manner. In addition, the modular structure of Seamless-walk enables scalable installation of a tactile sensing platform at reasonable cost. Human tests (n = 80) confirmed that the proposed Seamless-walk system’s technical advantage increases usability. A 3D virtual world exploration game experiment revealed that the proposed method significantly increases comfort and overall naturalness. Additionally, The proposed method has no negative effects on exploration suitability, task load, simulator sickness, or the game experience.

