Comparing a Graphical User Interface, Hand Gestures and Controller in Virtual Reality for Robot Teleoperation

PubDate: March 2023
Teams: University of Nottingham
Writers: Jialin Chen;Armaghan Moemeni;Praminda Caleb-Solly
Abstract
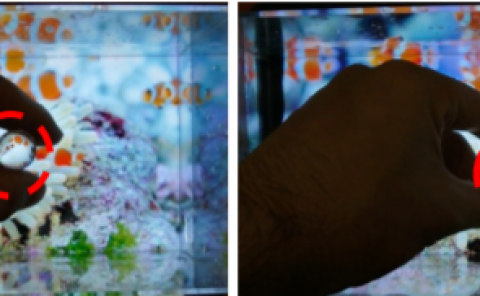
Robot teleoperation is being explored in a number of application areas, where combining human adaptive intelligence and high precision of robots can provide access to dangerous or inaccessible places, or augment human dexterity. Using virtual reality (VR) is one way to enable robot teleoperation, where additional information can be augmented in the display to make the remote control easier. In this paper, we present a robot teleoperation system, developed and deployed on a JAKA Minicobo robotic arm, to compare the user experience and performance for three different control methods. These include a VR controller, VR gestures, and a traditional graphical user interface (GUI). Each study participant was asked to conduct the experiment twice using all three methods, during which the time, the total spatial distance of the robot end-effector movement, and the frequency of errors in a teleoperation task were recorded for quantitative analysis. All participants were also asked to complete a questionnaire based on the NASA task load index. The results show that overall the VR gestures method enables users to complete the task faster than the VR controller, and using the traditional GUI is generally slower. While the quantitative results do not show statistically significant differences, both of the VR methods place greater perceived physical and mental demands on the users, in comparison to the GUI, although when asked which method they preferred, only three of the sixteen participants preferred the VR gestures method. Given that a number of applications use VR, this study indicates that if the task is not time critical, then a traditional GUI might be more suitable for reducing perceived mental and physical load, and controller-free VR interaction might not always be desirable.