Real Time Point Cloud Self-Avatar With A Single RGB-D Camera

Note: We don't have the ability to review paper
PubDate: November 2019
Teams: IFSTTAR
Writers: Hela Ridha-Mahfoudhi;Nguyen-Thong Dang
PDF: Real Time Point Cloud Self-Avatar With A Single RGB-D Camera
Abstract
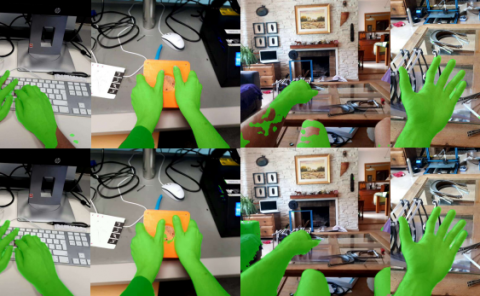
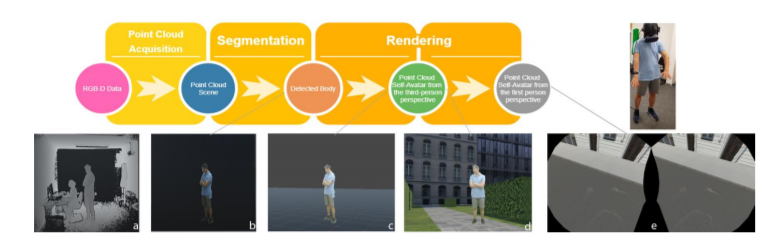
This paper presents a method for generating in real-time a self-avatar using a single RGB-D Camera. The self-avatar was presented under the form of a point cloud, retrieved thanks to a Kinect V2. The method included smoothing, filtering, segmenting and remapping point data presenting the user’s body in real-time. The point cloud avatar in the third and the first person view can be generated.