Virtual Reality Based Robot Teleoperation via Human-Scene Interaction

PubDate: Aug 2023
Teams: Shenzhen Key Laboratory of Robotics Perception and Intelligence;Southern University of Science and Technology,;Southern University of Science and Technology;National Clinical Research Center for Orthopedics
Writers: Lingxiao Meng, Jiangshan Liu, Wei Chai, Jiankun Wang, Max Q.-H. Meng
PDF: Virtual Reality Based Robot Teleoperation via Human-Scene Interaction
Abstract
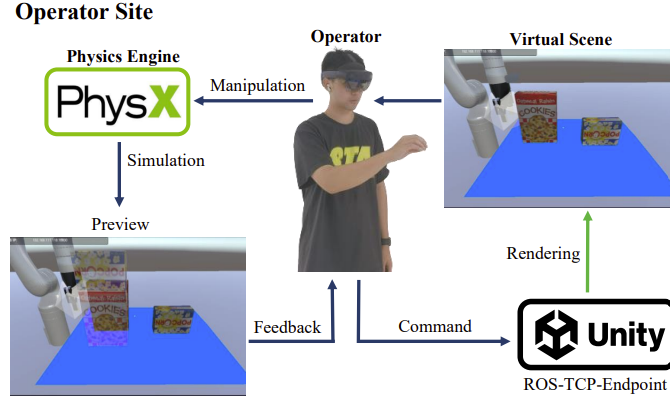
Robot teleoperation gains great success in various situations, including chemical pollution rescue, disaster relief, and long-distance manipulation. In this article, we propose a virtual reality (VR) based robot teleoperation system to achieve more efficient and natural interaction with humans in different scenes. A user-friendly VR interface is designed to help users interact with a desktop scene using their hands efficiently and intuitively. To improve user experience and reduce workload, we simulate the process in the physics engine to help build a preview of the scene after manipulation in the virtual scene before execution. We conduct experiments with different users and compare our system with a direct control method across several teleoperation tasks. The user study demonstrates that the proposed system enables users to perform operations more instinctively with a lighter mental workload. Users can perform pick-and-place and object-stacking tasks in a considerably short time, even for beginners. Our code is available at this https URL.