Designing Variable Stiffness Profiles To Optimize The Physical Human Robot Interface Of Hand Exoskeletons

Teams: Facebook
Writers: Rohit John Varghese, Gaurav Mukherjee, Raymond King, Sean Keller, Ashish D. Deshpande
Publication date: August 26, 2018
Abstract
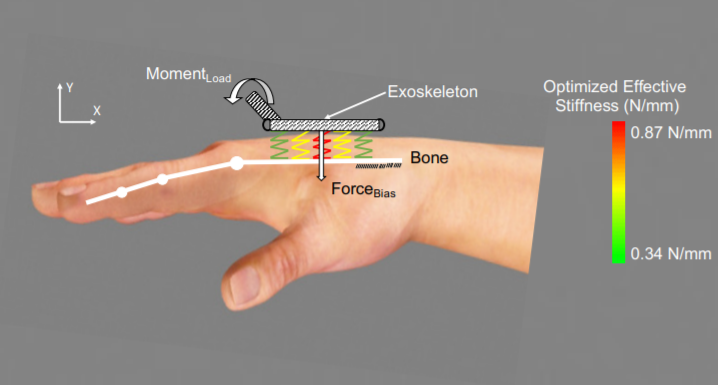
The design of comfortable and effective physical human robot interaction (pHRI) interfaces for force transfer is a prominent challenge for coupled human-robot systems. Forces applied by the robot at the fingers create reaction forces on the dorsal surface of the hand, often leading to high pressure concentrations which can cause pain and discomfort. In this paper, the interaction between the pHRI interface and the dorsal surface of the hand is systematically characterized, and a new method for the design of comfortable interfaces is presented. The variability of the stiffness of the hand dorsum is quantified experimentally, and this data is used to minimize the peak pressure exerted on the hand dorsum, by varying the stiffness profile of the pHRI interface. This optimized design is demonstrated to improve the pressure distribution over the hand dorsum where the robot is attached to the hand. Additionally, to enable informed design choices, the effects of varying the stiffness of the pHRI interface on relative displacement between the robot and the hand dorsum are also characterized. This optimization approach to designing pHRI interface can be extended to different limbs, especially when there is a transfer of high moment loads to the human body, provided the appropriate stiffness data is available.