Drone Flight Path Architecture

PubDate: Aug 2023
Teams: Bogotá, Colombia
Writers: Andres Forero Osorio, Carlos Andrés Torres Echeverría
PDF: Drone Flight Path Architecture
Abstract
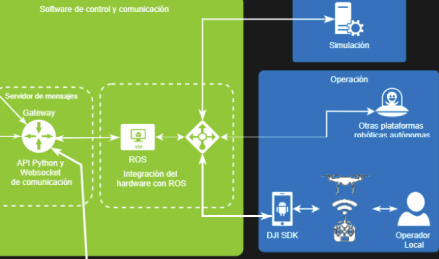
This project was built from a pre-existing architecture that facilitates the planning and automatic execution of drone routes in a known space through a 3D virtual reality environment. Our work consisted in extending this architecture by integrating a new web component, making use of a 3D map API, to facilitate to people who do not have access to virtual reality hardware, the possibility of planning flight routes that have as parameters the
