QuaterNet: A Quaternion-based Recurrent Model for Human Motion

Title: QuaterNet: A Quaternion-based Recurrent Model for Human Motion
Teams: Facebook
Writers: Dario Pavllo, David Grangier, Michael Auli
Publication date: September 3, 2018
Abstract
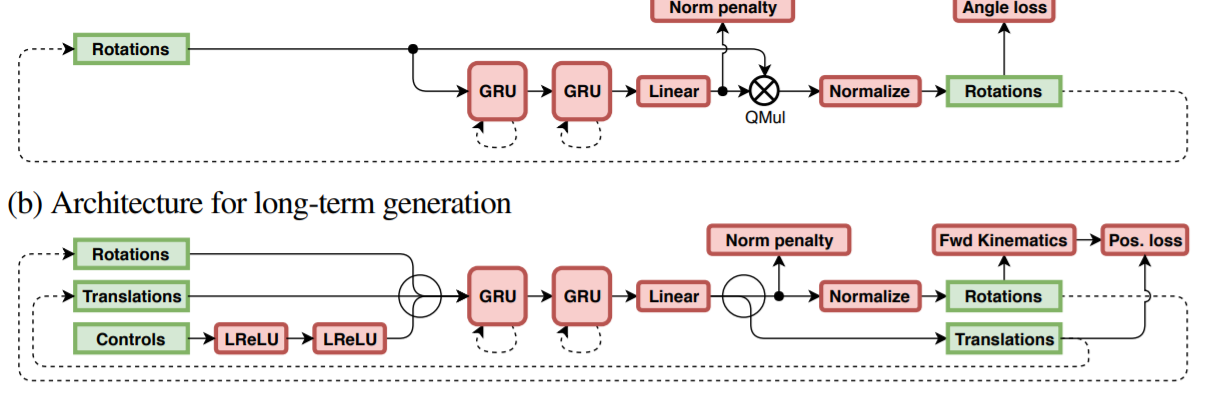
Deep learning for predicting or generating 3D human pose sequences is an active research area. Previous work regresses either joint rotations or joint positions. The former strategy is prone to error accumulation along the kinematic chain, as well as discontinuities when using Euler angle or exponential map parameterizations. The latter requires re-projection onto skeleton constraints to avoid bone stretching and invalid configurations. This work addresses both limitations. Our recurrent network, QuaterNet, represents rotations with quaternions and our loss function performs forward kinematics on a skeleton to penalize absolute position errors instead of angle errors. On short-term predictions, QuaterNet improves the state-of-the-art quantitatively. For long-term generation, our approach is qualitatively judged as realistic as recent neural strategies from the graphics literature.