Research on Virtual Reality 3D Display and Teleoperation Technologies for an Inspection Robot in a Steam Generator

PubDate: July 2019
Teams: Sichuan University
Writers: Zhenyang Li;Songyi Dian;Chao Li
Abstract
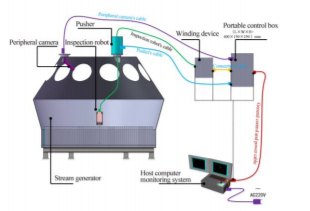
The steam generator is the key device of nuclear power station. In the strong radiation environment of the steam generator, inspection robots are usually used to perform inspection tasks instead of manual work. In this paper, to create a more realistic virtual reality environment for operators, we propose a virtual reality 3D display and teleoperation system for the inspection robot in the steam generator. With Unity3D as the development environment, the host computer of the system can visually present the model of the steam generator and inspection robot. Moreover, the pose information of the actual robot is presented in Unity3D. On the slave computer, with Linux/ROS as the development environment, we use Intel RealSense D435 camera to perceive the surrounding environment of the robot and obtain the pose information of the robot through RTAB-MAP SLAM. Through ROS-Sharp, an open-source code library, the communication between Linux/ROS and Unity3D is realized. The performance of the system is verified by experiments based on datasets, semi-physical simulation, and physical camera.