Comparing human-robot proxemics between virtual reality and the real world

PubDate: March 2019
Teams: KTH Royal Institute of Technology
Writers: Rui Li;Marc van Almkerk;Sanne van Waveren;Elizabeth Carter;Iolanda Leite
PDF: Comparing human-robot proxemics between virtual reality and the real world
Abstract
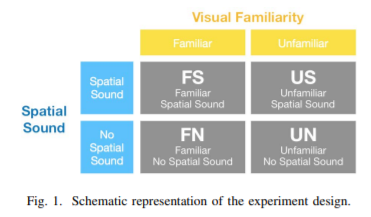
Virtual Reality (VR) can greatly benefit Human-Robot Interaction (HRI) as a tool to effectively iterate across robot designs. However, possible system limitations of VR could influence the results such that they do not fully reflect real-life encounters with robots. In order to better deploy VR in HRI, we need to establish a basic understanding of what the differences are between HRI studies in the real world and in VR. This paper investigates the differences between the real life and VR with a focus on proxemic preferences, in combination with exploring the effects of visual familiarity and spatial sound within the VR experience. Results suggested that people prefer closer interaction distances with a real, physical robot than with a virtual robot in VR. Additionally, the virtual robot was perceived as more discomforting than the real robot, which could result in the differences in proxemics. Overall, these results indicate that the perception of the robot has to be evaluated before the interaction can be studied. However, the results also suggested that VR settings with different visual familiarities are consistent with each other in how they affect HRI proxemics and virtual robot perceptions, indicating the freedom to study HRI in various scenarios in VR. The effect of spatial sound in VR drew a more complex picture and thus calls for more in-depth research to understand its influence on HRI in VR.