A Balanced Hybrid Active-Passive Actuation Approach for HighPerformance Haptics

Title: A Balanced Hybrid Active-Passive Actuation Approach for HighPerformance Haptics
Teams: Facebook
Writers: Chembian Parthiban, Patrick Dills, It Fufuengsin, Nick Colonnese, Priyanshu Agarwal, Michael Zinn
Publication date: July 12, 2019
Abstract
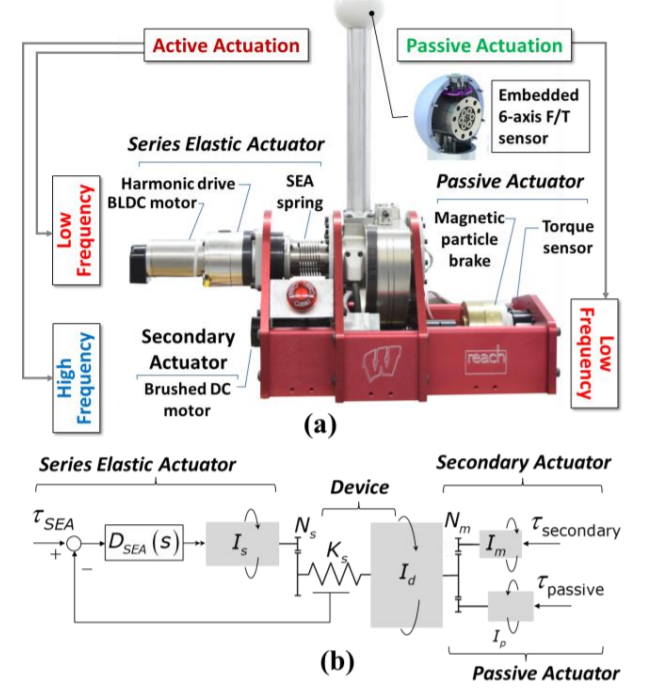
Hybrid actuation approaches for haptic interfaces generally suffer from asymmetry in active and passive torque capabilities. This paper describes the design of a high-performance balanced hybrid haptic device, which addresses the asymmetry by combining a high-power, low-impedance active compliant actuation (series-elastic actuator) with energy absorbing high-force passive actuation in parallel with a fast, low-power secondary active actuation. We describe the actuation, design and control approaches and experimentally validate the approach with a one degree-of-freedom testbed. The performance is compared with active only approach and results show significant improvements in stability and rendering range of the device.