Z-Qualities and Renderable Mass-Damping-Stiffness Spaces: Describing the Set of Renderable Dynamics of Kinesthetic Haptic Displays

Teams: Facebook
Writers: Nick Colonnese, Sonny Chan
Publication date: July 12, 2019
Abstract
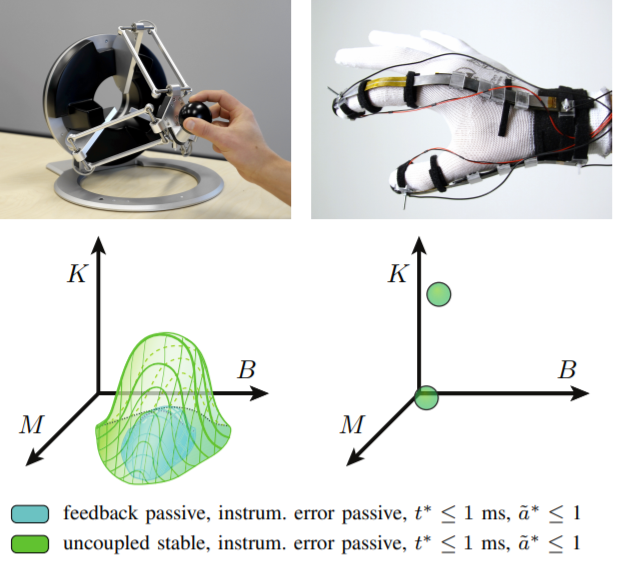
In this paper we define language and definitions to define the renderable set of dynamics that a general kinesthetic haptic display can render to a human operator. This is accomplished in three steps. First, we present a model that applies to every kinesthetic haptic display. Then, we define the Z-Qualities of a haptic display: characteristics that describe the display’s stability, sensitivity to instrumentation error, speed of changing the rendered dynamics, and accuracy of the rendered and desired dynamics. Finally, we define the Renderable Mass-Damping-Stiffness Spaces of a haptic display: the set of mass-damper-spring impedances that the display can render that satisfy specified Z-Quality constraints. We highlight existing key results for various Z-Qualities, and provide illustrative examples of renderable mass-damping-stiffness spaces for popular specified Z-Qualities ‘Passiva’ and ‘Stabila.’ This work aims to provide a framework for determining if a given haptic display can render dynamics with certain qualities, and we hope is particularly useful for psychophysical and scientific studies where accurate rendered dynamics to the human are essential.