Panoramic convolutions for 360º single-image saliency prediction

PubDate: June 2020
Teams: Universidad de Zaragoza,I3A
Writers: Daniel Martín, Ana Serrano, Belen Masia
PDF: Panoramic convolutions for 360º single-image saliency prediction
Project: Panoramic convolutions for 360º single-image saliency prediction
Abstract
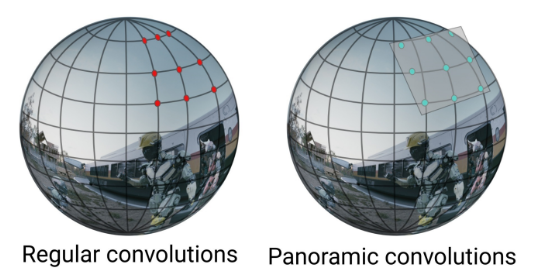
We present a convolutional neural network based on panoramic convolutions for saliency prediction in 360º equirectangular panoramas. Our network architecture is designed leveraging recently presented 360o-aware convolutions that represent kernels as patches tangent to the sphere where the panorama is projected, and a spherical loss function that penalizes prediction errors for each pixel depending on its coordinates in a gnomonic projection. Our model is able to successfully predict saliency in 360º scenes from a single image, outperforming other state-of-the-art approaches for panoramic content, and yielding more precise results that may help in the understanding of users’ behavior when viewing 360º VR content.