Instant SLAM Initialization for Outdoor Omnidirectional Augmented Reality

PubDate: May 2018
Teams: Zhejiang University of Technology
Writers: Ruyu Liu;Jianhua Zhang;Kejie Yin;Jiaxin Wu;Ruihao Lin;Shengyong Chen
PDF: Instant SLAM Initialization for Outdoor Omnidirectional Augmented Reality
Abstract
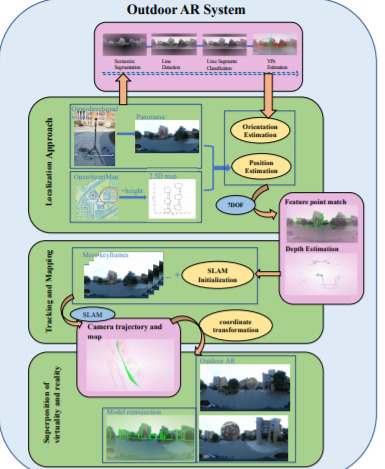
The initialization and absolute scale are two critical issues for an Augmented Reality (AR) system. Most existing methods have to resort to some external sensors or some special steps, to initialize an AR system and to obtain a correct scale. In this paper, we introduce an omnidirectional AR system, which can be instantly initialized, recover the absolute scale without other sensor data, and provide a full 360-degrees field-of-view (Fov) to give users the best immersive feelings. Our system shows how to firstly estimate the absolute orientation using the meaningful line and point cues from a single panorama, and how to estimate the camera global position by aligning a panorama after semantic segmentation with a widely available 2.5D map. Based on resulting absolute pose from a single frame, we subsequently render a depth map to initialize a SLAM system. We can then fuse the virtual elements with a real scene according to the continuous camera motion from the SLAM system. We evaluate the SLAM initialization approach on a challenging dataset. The experiments indicate that localization precision from our method is obviously superior to that from consumer GPS devices and we remain unbeatable in time performance compared to previous methods.