SIDOD: A Synthetic Image Dataset for 3D Object Pose Recognition with Distractors

Title: SIDOD: A Synthetic Image Dataset for 3D Object Pose Recognition with Distractors
Teams: Nvidia;Boston University
Writers: Mona Jalal (Boston University, NVIDIA);Josef Spjut;Ben Boudaoud;Margrit Betke (Boston University)
Publication date: June 16, 2019
Abstract
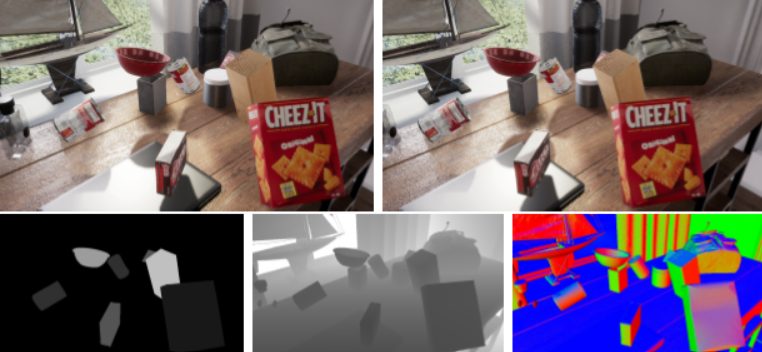
We present a new image dataset generated by the NVIDIA Deep Learning Data Synthesizer intended for use in object detection, pose estimation, and tracking applications. This dataset contains 144k stereo image pairs generated from 18 camera view points of three photorealistic virtual environments with up to 10 objects (chosen randomly from the 21 object models of the YCB dataset) and flying distractors. Object and camera pose, scene lighting, and quantity of objects and distractors were randomized. Each provided view includes RGB, depth, segmentation, and surface normal images. We describe our approach for domain randomization and provide insight into the decisions that produced the dataset.