Telewheelchair: The intelligent electric wheelchair system towards human-machine combined environmental supports

PubDate: July 2017
Teams: University of Tsukuba;AISIN Seiki Co
Writers: Ippei Suzuki;Satoshi Hashizume;Kazuki Takazawa;Ryuichiro Sasaki;Yoshikuni Hashimoto;Yoichi Ochiai
Abstract
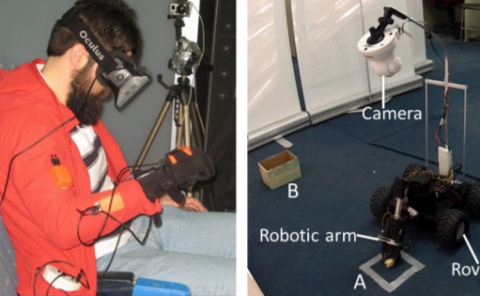
In this paper, we propose a telepresence system that is able to provide care from a remote location by implementing functions such as object recognition on a wheelchair (Figure 1 Left). In conventional remote control robots, the operator controls the system while receiving feedback from cameras mounted on the robot [Gundersen et al. 1996]. However, this operating method cannot capture the full environment around the system, even if we use wide FOV cameras, such as omnidirectional cameras. This leaves the operator with incomplete feedback. In order to utilize the telepresence system safely, it is necessary to solve the problem of the blind spot of the user. Further, human operators are limited by their attention span. The reaction time of the computer is greater than that of humans.