Embodied media: expanding human capacity via virtual reality and telexistence (keynote)

PubDate: October 2016
Teams: University of Tokyo
Writers: Susumu Tachi
PDF: Embodied media: expanding human capacity via virtual reality and telexistence (keynote)
Abstract
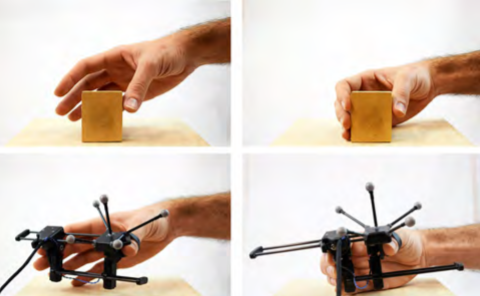
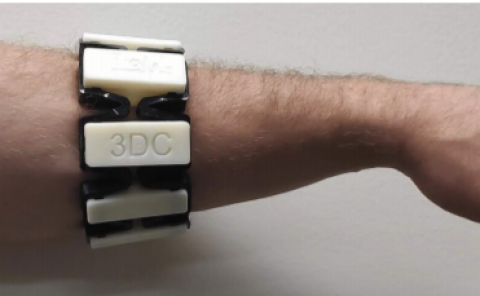
The information we acquire in real life gives us a holistic experience that fully incorporates a variety of sensations and bodily motions such as seeing, hearing, speaking, touching, smelling, tasting, and moving. However, the sensory modalities that can be transmitted in our information space are usually limited to visual and auditory ones. Haptic information is rarely used in the information space in our daily lives except in the case of warnings or alerts such as cellphone vibrations. Embodied media such as virtual reality and telexistence should provide holistic sensations, i.e., integrating visual, auditory, haptic, palatal, olfactory, and kinesthetic sensations, such that human users feel that they are present in a computer-generated virtual information space or a remote space having an alternate presence in the environment. Haptics plays an important role in embodied media because it provides both proprioception and cutaneous sensations; it lets users feel like they are touching distant people and objects and also lets them “touch” artificial objects as they see them. In this keynote, an embodied media, which extends human experiences, is overviewed and our research on an embodied media that is both visible and tangible based on our proposed theory of haptic primary colors is introduced. The embodied media would enable telecommunication, tele-experience, and pseudo-experience providing sensations such that the user would feel like working in a natural environment. It would also enable humans to engage in creative activities such as design and creation as though they were in the real environment. We have succeeded in transmitting fine haptic sensations, such as material texture and temperature, from an avatar robot’s fingers to a human user’s fingers. The avatar robot is a telexistence anthropomorphic robot, called TELESAR V, with a body and limbs with 53 degrees of freedom. This robot can transmit not only visual and auditory sensations of presence to human users but also realistic haptic sensations. Our other inventions include RePro3D, which is a full-parallax autostereoscopic 3D (three-dimensional) display with haptic feedback using RPT (retroreflective projection technology); TECHTILE Toolkit, which is a prototyping tool for the design and improvement of haptic media; and HaptoMIRAGE, which is an 180°-field-of-view autostereoscopic 3D display using ARIA (active-shuttered real image autostereoscopy) that can be used by three users simultaneously.