Robotic Haptic Proxies for Collaborative Virtual Reality

Note: We don't have the ability to review paper
PubDate: Jan 2017
Teams: New York University
Writers: Zhenyi He, Fengyuan Zhu, Aaron Gaudette, Ken Perlin
PDF: Robotic Haptic Proxies for Collaborative Virtual Reality
Abstract
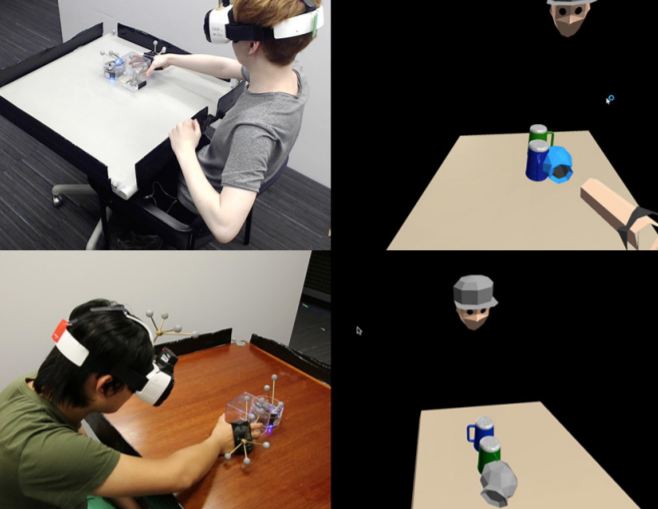
We propose a new approach for interaction in Virtual Reality (VR) using mobile robots as proxies for haptic feedback. This approach allows VR users to have the experience of sharing and manipulating tangible physical objects with remote collaborators. Because participants do not directly observe the robotic proxies, the mapping between them and the virtual objects is not required to be direct. In this paper, we describe our implementation, various scenarios for interaction, and a preliminary user study.