Embedded Systems Architecture for SLAM Applications

PubDate: Feb 2017
Teams: IEEE
Writers: Jie Tang, Shaoshan Liu, Jean-Luc Gaudiot
PDF: Embedded Systems Architecture for SLAM Applications
Abstract
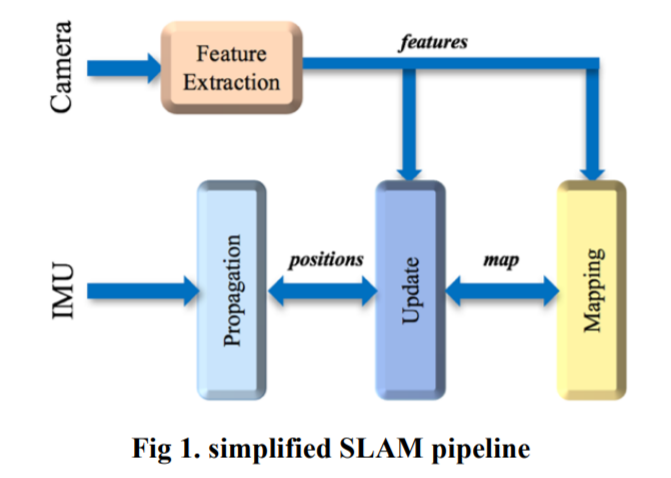
In recent years, we have observed a clear trend in the rapid rise of autonomous vehicles, robotics, virtual reality, and augmented reality. The core technology enabling these applications, Simultaneous Localization And Mapping (SLAM), imposes two main challenges: first, these workloads are computationally intensive and they often have real-time requirements; second, these workloads run on battery-powered mobile devices with limited energy budget. In short, the essence of these challenges is that performance should be improved while simultaneously reducing energy consumption, two rather contradicting goals by conventional wisdom. In this paper, we take a close look at state-of-the-art Simultaneous Localization And Mapping (SLAM) workloads, especially how these workloads behave on mobile devices. Based on the results, we propose a mobile architecture to improve SLAM performance on mobile devices.
