Monocular LSD-SLAM Integration within AR System

PubDate: Feb 2017
Teams: Graz University of Technology
Writers: Markus Höll, Vincent Lepetit
PDF: Monocular LSD-SLAM Integration within AR System
Abstract
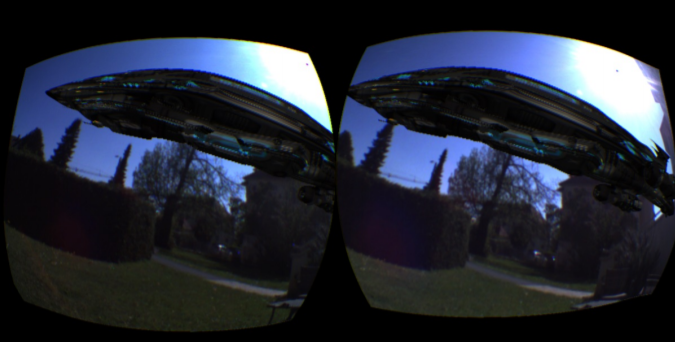
In this paper, we cover the process of integrating Large-Scale Direct Simultaneous Localization and Mapping (LSD-SLAM) algorithm into our existing AR stereo engine, developed for our modified “Augmented Reality Oculus Rift”. With that, we are able to track one of our realworld cameras which are mounted on the rift, within a complete unknown environment. This makes it possible to achieve a constant and full augmentation, synchronizing our 3D movement (x, y, z) in both worlds, the real world and the virtual world. The development for the basic AR setup using the Oculus Rift DK1 and two fisheye cameras is fully documented in our previous paper. After an introduction to image-based registration, we detail the LSD-SLAM algorithm and document our code implementing our integration. The AR stereo engine with Oculus Rift support can be accessed via the GIT repository this https URL and the modified LSD-SLAM project used for the integration is available here this https URL.