Kinematically Redundant Octahedral Motion Platform for Virtual Reality Simulations

PubDate: Nov 2017
Teams: Vienna University of Technology
Writers: Georg Nawratil, Arvin Rasoulzadeh
PDF: Kinematically Redundant Octahedral Motion Platform for Virtual Reality Simulations
Abstract
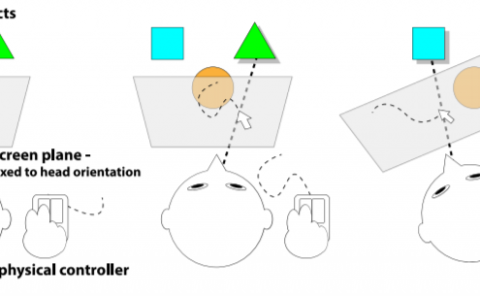
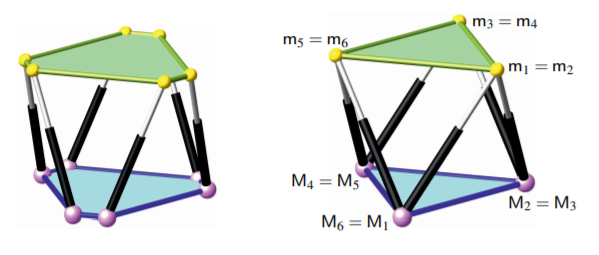
We propose a novel design of a parallel manipulator of Stewart Gough type for virtual reality application of single individuals; i.e. an omni-directional treadmill is mounted on the motion platform in order to improve VR immersion by giving feedback to the human body. For this purpose we modify the well-known octahedral manipulator in a way that it has one degree of kinematical redundancy; namely an equiform reconfigurability of the base. The instantaneous kinematics and singularities of this mechanism are studied, where especially “unavoidable singularities” are characterized. These are poses of the motion platform, which can only be realized by singular configurations of the mechanism despite its kinematic redundancy.