ReHabgame A non-immersive virtual reality rehabilitation system with applications in neuroscience

PubDate: Apr 2018
Teams: Anglia Ruskin University;
Writers: Shabnam Sadeghi Esfahlani, Tommy Thompson, Ali D. Parsa, Ian Brown, Silvia Cirstea
PDF: ReHabgame A non-immersive virtual reality rehabilitation system with applications in neuroscience
Abstract
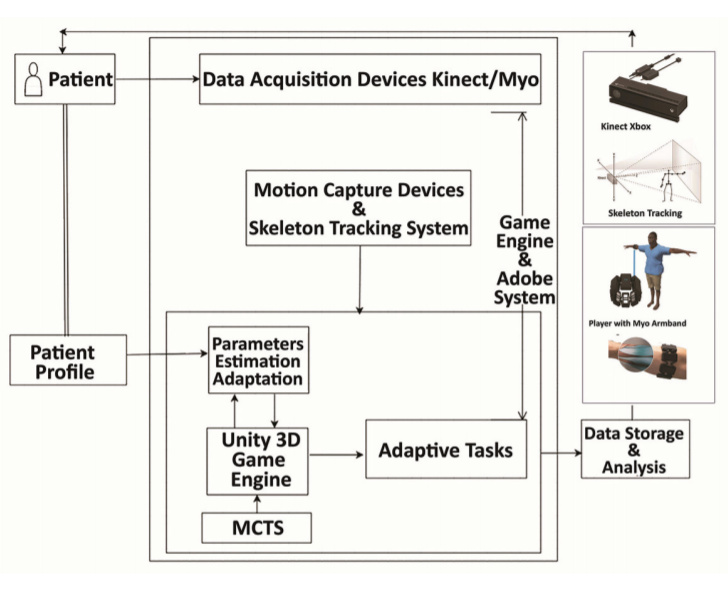
This paper proposes the use of a non-immersive virtual reality rehabilitation system ReHabgame developed using Microsoft Kinect and the Thalmic Labs Myo gesture control armband. The ReHabgame was developed based on two third-person video games that provide a feasible possibility of assessing postural control and functional reach tests. It accurately quantifies specific postural control mechanisms including timed standing balance, functional reach tests using real-time anatomical landmark orientation, joint velocity, and acceleration while end trajectories were calculated using an inverse kinematics algorithm. The game was designed to help patients with neurological impairment to be subjected to physiotherapy activity and practice postures of daily activities. The subjective experience of the ReHabgame was studied through the development of an Engagement Questionnaire (EQ) for qualitative, quantitative and Rasch model. The Monte-Carlo Tree Search (MCTS) and Random object (ROG) generator algorithms were used to adapt the physical and gameplay intensity in the ReHabgame based on the Motor Assessment Scale (MAS) and Hierarchical Scoring System (HSS). Rasch analysis was conducted to assess the psychometric characteristics of the ReHabgame and to identify if these are any misfitting items in the game. Rasch rating scale model (RSM) was used to assess the engagement of players in the ReHabgame and evaluate the effectiveness and attractiveness of the game. The results showed that the scales assessing the rehabilitation process met Rasch expectations of reliability, and unidimensionality. Infit and outfit mean squares values are in the range of (0.68 1.52) for all considered 16 items. The Root Mean Square Residual (RMSR) and the person separation reliability were acceptable. The item/person map showed that the persons and items were clustered symmetrically.