Holdable Haptic Device for 4-DOF Motion Guidance

PubDate: Mar 2019
Teams: Stanford Universit;University of Montpellier
Writers: Julie M. Walker, Nabil Zemiti, Philippe Poignet, Allison M. Okamura
PDF: Holdable Haptic Device for 4-DOF Motion Guidance
Abstract
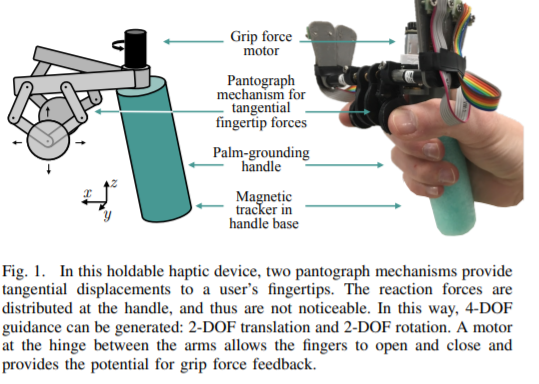
Hand-held haptic devices can allow for greater freedom of motion and larger workspaces than traditional grounded haptic devices. They can also provide more compelling haptic sensations to the users’ fingertips than many wearable haptic devices because reaction forces can be distributed over a larger area of skin far away from the stimulation site. This paper presents a hand-held kinesthetic gripper that provides guidance cues in four degrees of freedom (DOF). 2-DOF tangential forces on the thumb and index finger combine to create cues to translate or rotate the hand. We demonstrate the device’s capabilities in a three-part user study. First, users moved their hands in response to haptic cues before receiving instruction or training. Then, they trained on cues in eight directions in a forced-choice task. Finally, they repeated the first part, now knowing what each cue intended to convey. Users were able to discriminate each cue over 90% of the time. Users moved correctly in response to the guidance cues both before and after the training and indicated that the cues were easy to follow. The results show promise for holdable kinesthetic devices in haptic feedback and guidance for applications such as virtual reality, medical training, and teleoperation.