Quasi-Direct Drive for Low-Cost Compliant Robotic Manipulation

PubDate: Apr 2019
Teams: University of California;
Writers: David V. Gealy, Stephen McKinley, Brent Yi, Philipp Wu, Phillip R. Downey, Greg Balke, Allan Zhao, Menglong Guo, Rachel Thomasson, Anthony Sinclair, Peter Cuellar, Zoe McCarthy, Pieter Abbeel
PDF: Quasi-Direct Drive for Low-Cost Compliant Robotic Manipulation

Abstract
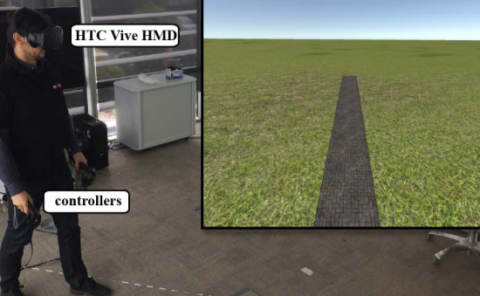
Robots must cost less and be force-controlled to enable widespread, safe deployment in unconstrained human environments. We propose Quasi-Direct Drive actuation as a capable paradigm for robotic force-controlled manipulation in human environments at low-cost. Our prototype - Blue - is a human scale 7 Degree of Freedom arm with 2kg payload. Blue can cost less than $5000. We show that Blue has dynamic properties that meet or exceed the needs of human operators: the robot has a nominal position-control bandwidth of 7.5Hz and repeatability within 4mm. We demonstrate a Virtual Reality based interface that can be used as a method for telepresence and collecting robot training demonstrations. Manufacturability, scaling, and potential use-cases for the Blue system are also addressed. Videos and additional information can be found online at this http URL