Learning an Action-Conditional Model for Haptic Texture Generation

PubDate: Sep 2019
Teams: Stanford University;Robotics Institute at Carnegie Mellon University;
Writers: Negin Heravi, Wenzhen Yuan, Allison M. Okamura, Jeannette Bohg
PDF: Learning an Action-Conditional Model for Haptic Texture Generation
Abstract
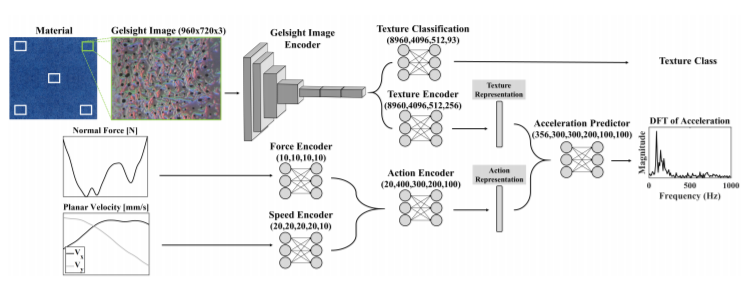
Rich haptic sensory feedback in response to user interactions is desirable for an effective, immersive virtual reality or teleoperation system. However, this feedback depends on material properties and user interactions in a complex, non-linear manner. Therefore, it is challenging to model the mapping from material and user interactions to haptic feedback in a way that generalizes over many variations of the user’s input. Current methodologies are typically conditioned on user interactions, but require a separate model for each material. In this paper, we present a learned action-conditional model that uses data from a vision-based tactile sensor (GelSight) and user’s action as input. This model predicts an induced acceleration that could be used to provide haptic vibration feedback to a user. We trained our proposed model on a publicly available dataset (Penn Haptic Texture Toolkit) that we augmented with GelSight measurements of the different materials. We show that a unified model over all materials outperforms previous methods and generalizes to new actions and new instances of the material categories in the dataset.
