Decoding pedestrian and automated vehicle interactions using immersive virtual reality and interpretable deep learning

PubDate: Feb 2020
Teams: Ryerson University
Writers: Arash Kalatian, Bilal Farooq
Abstract
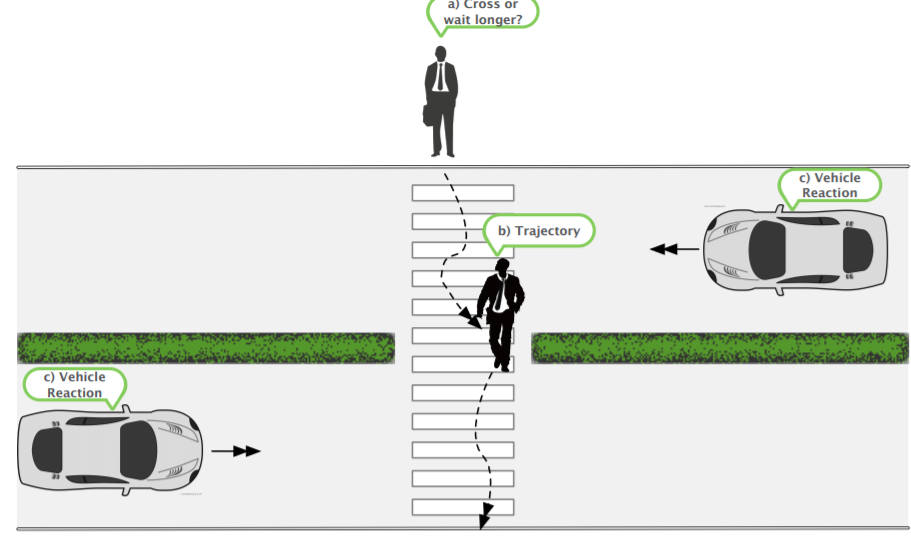
To ensure pedestrian friendly streets in the era of automated vehicles, reassessment of current policies, practices, design, rules and regulations of urban areas is of importance. This study investigates pedestrian crossing behaviour, as an important element of urban dynamics that is expected to be affected by the presence of automated vehicles. For this purpose, an interpretable machine learning framework is proposed to explore factors affecting pedestrians’ wait time before crossing mid-block crosswalks in the presence of automated vehicles. To collect rich behavioural data, we developed a dynamic and immersive virtual reality experiment, with 180 participants from a heterogeneous population in 4 different locations in the Greater Toronto Area (GTA). Pedestrian wait time behaviour is then analyzed using a data-driven Cox Proportional Hazards (CPH) model, in which the linear combination of the covariates is replaced by a flexible non-linear deep neural network. The proposed model achieved a 5% improvement in goodness of fit, but more importantly, enabled us to incorporate a richer set of covariates. A game theoretic based interpretability method is used to understand the contribution of different covariates to the time pedestrians wait before crossing. Results show that the presence of automated vehicles on roads, wider lane widths, high density on roads, limited sight distance, and lack of walking habits are the main contributing factors to longer wait times. Our study suggested that, to move towards pedestrian-friendly urban areas, national level educational programs for children, enhanced safety measures for seniors, promotion of active modes of transportation, and revised traffic rules and regulations should be considered.