Deep Positional and Relational Feature Learning for Rotation-Invariant Point Cloud Analysis

PubDate: Aug 2020
Teams: Xi’an Jiaotong University;Technical University of Munich;Google
Writers: Ruixuan Yu, Xin Wei, Federico Tombari, Jian Sun
PDF: Deep Positional and Relational Feature Learning for Rotation-Invariant Point Cloud Analysis
Abstract
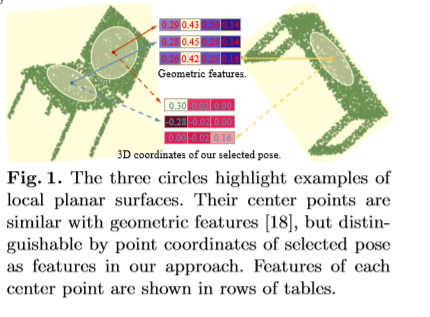
In this paper we propose a rotation-invariant deep network for point clouds analysis. Point-based deep networks are commonly designed to recognize roughly aligned 3D shapes based on point coordinates, but suffer from performance drops with shape rotations. Some geometric features, e.g., distances and angles of points as inputs of network, are rotation-invariant but lose positional information of points. In this work, we propose a novel deep network for point clouds by incorporating positional information of points as inputs while yielding rotationinvariance. The network is hierarchical and relies on two modules: a positional feature embedding block and a relational feature embedding block. Both modules and the whole network are proven to be rotation-invariant when processing point clouds as input. Experiments show state-of-theart classification and segmentation performances on benchmark datasets, and ablation studies demonstrate effectiveness of the network design.