Human and Machine Action Prediction Independent of Object Information

PubDate: Apr 2020
Teams: University of G¨ottingen;University of M¨unster;Vytautas Magnus University
Writers: Fatemeh Ziaeetabar, Jennifer Pomp, Stefan Pfeiffer, Nadiya El-Sourani, Ricarda I. Schubotz, Minija Tamosiunaite, Florentin Wörgötter
PDF: Human and Machine Action Prediction Independent of Object Information
Abstract
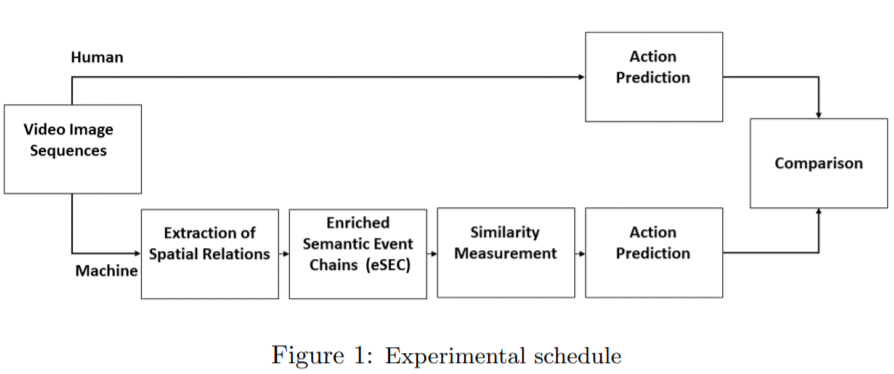
Predicting other people’s action is key to successful social interactions, enabling us to adjust our own behavior to the consequence of the others’ future actions. Studies on action recognition have focused on the importance of individual visual features of objects involved in an action and its context. Humans, however, recognize actions on unknown objects or even when objects are imagined (pantomime). Other cues must thus compensate the lack of recognizable visual object features. Here, we focus on the role of inter-object relations that change during an action. We designed a virtual reality setup and tested recognition speed for 10 different manipulation actions on 50 subjects. All objects were abstracted by emulated cubes so the actions could not be inferred using object information. Instead, subjects had to rely only on the information that comes from the changes in the spatial relations that occur between those cubes. In spite of these constraints, our results show the subjects were able to predict actions in, on average, less than 64% of the action’s duration. We employed a computational model -an enriched Semantic Event Chain (eSEC)- incorporating the information of spatial relations, specifically (a) objects’ touching/untouching, (b) static spatial relations between objects and (c) dynamic spatial relations between objects. Trained on the same actions as those observed by subjects, the model successfully predicted actions even better than humans. Information theoretical analysis shows that eSECs optimally use individual cues, whereas humans presumably mostly rely on a mixed-cue strategy, which takes longer until recognition. Providing a better cognitive basis of action recognition may, on one hand improve our understanding of related human pathologies and, on the other hand, also help to build robots for conflict-free human-robot cooperation. Our results open new avenues here.