3D Scene Reconstruction by Multiple Structured-Light Based Commodity Depth Cameras

Title: 3D Scene Reconstruction by Multiple Structured-Light Based Commodity Depth Cameras
Teams: Microsoft
Writers: Jianfeng Wang Cha Zhang Wenwu Zhu Zhengyou Zhang Zixiang Xiong Philip A. Chou
Publication date: March 2012
Abstract
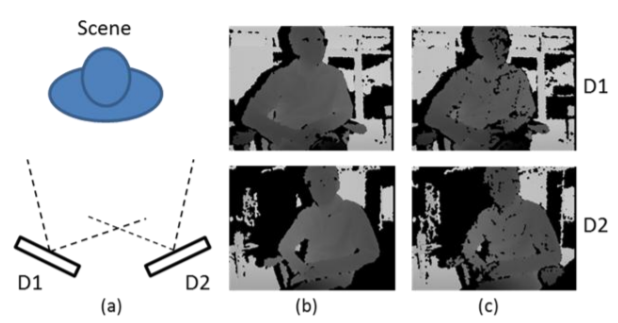
Commodity depth cameras have attracted a lot of research interest recently, in particular the structured-light based Kinect cameras available on the mass market. One important application of such cameras is 3D scene reconstruction and view synthesis. However, a single depth camera often has limited field of view and there is missing depth information when synthesizing a virtual view from a new viewpoint. In this paper, we study the problem of 3D scene reconstruction from multiple structured-light based depth cameras. Since multiple cameras may cause severe interference in the regions where the projected light overlaps, we present a novel plane-sweeping based algorithm to handle such interference. The proposed algorithm takes into account the correlation between multiple projectors and the infrared images as well as the correlation between the infrared images, thereby recovering the depth information for both overlapped and non-overlapped regions. Simulation results demonstrate that the proposed solution is very effective on various scenes.