TeslaMirror: Multistimulus Encounter-Type Haptic Display for Shape and Texture Rendering in VR

PubDate: Jul 2020
Teams: Skolkovo Institute of Science and Technology;Hong Kong Polytechnic University
Writers: Aleksey Fedoseev, Akerke Tleugazy, Luiza Labazanova, Dzmitry Tsetserukou
PDF: TeslaMirror: Multistimulus Encounter-Type Haptic Display for Shape and Texture Rendering in VR
Abstract
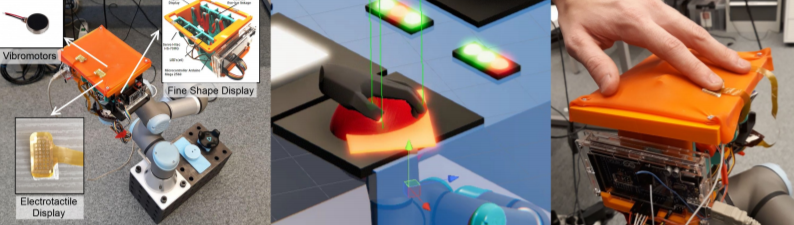
This paper proposes a novel concept of a hybrid tactile display with multistimulus feedback, allowing the real-time experience of the position, shape, and texture of the virtual object. The key technology of the TeslaMirror is that we can deliver the sensation of object parameters (pressure, vibration, and electrotactile feedback) without any wearable haptic devices. We developed the full digital twin of the 6 DOF UR robot in the virtual reality (VR) environment, allowing the adaptive surface simulation and control of the hybrid display in real-time. The preliminary user study was conducted to evaluate the ability of TeslaMirror to reproduce shape sensations with the under-actuated end-effector. The results revealed that potentially this approach can be used in the virtual systems for rendering versatile VR shapes with high fidelity haptic experience.