Automatic 3D Indoor Scene Modeling From Single Panorama

Title: Automatic 3D Indoor Scene Modeling From Single Panorama
Teams: Microsoft
Writers: Yang Yang Shi Jin Ruiyang Liu Sing Bing Kang Jingyi Yu
Publication date: April 2018
Abstract
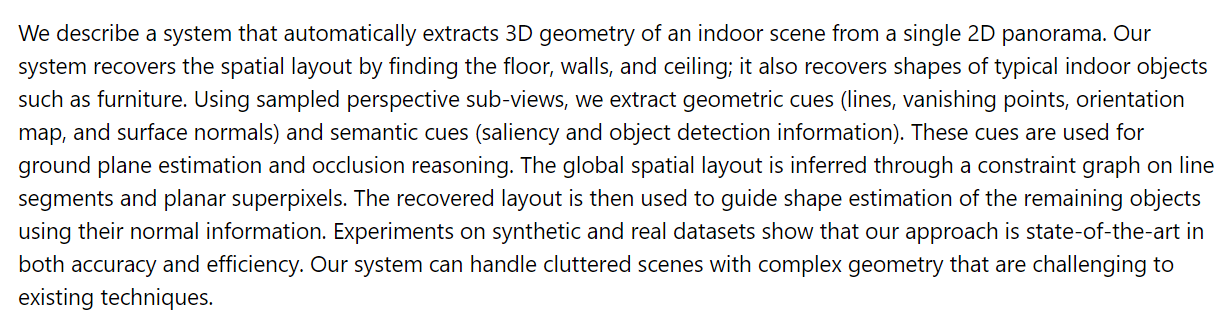
We describe a system that automatically extracts 3D geometry of an indoor scene from a single 2D panorama. Our system recovers the spatial layout by finding the floor, walls, and ceiling; it also recovers shapes of typical indoor objects such as furniture. Using sampled perspective sub-views, we extract geometric cues (lines, vanishing points, orientation map, and surface normals) and semantic cues (saliency and object detection information). These cues are used for ground plane estimation and occlusion reasoning. The global spatial layout is inferred through a constraint graph on line segments and planar superpixels. The recovered layout is then used to guide shape estimation of the remaining objects using their normal information. Experiments on synthetic and real datasets show that our approach is state-of-the-art in both accuracy and efficiency. Our system can handle cluttered scenes with complex geometry that are challenging to existing techniques.