NRMVS: Non-Rigid Multi-view Stereo

Title: NRMVS: Non-Rigid Multi-view Stereo
Teams: Nvidia, Technical University of Munich, University of Erlangen-Nuremberg, Friedrich-Alexander University of Erlangen-Nuremberg
Authors: Matthias Innmann, Kihwan Kim, Jinwei Gu, Matthias Niessner, Charles Loop, Marc Stamminger, Jan Kautz
PubDate: March 2, 2020
Abstract
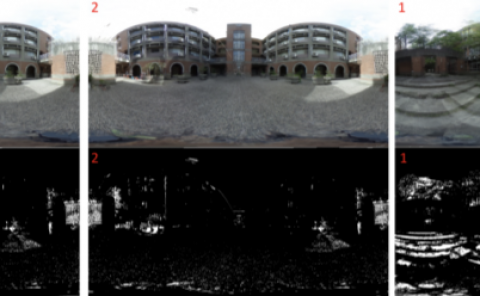
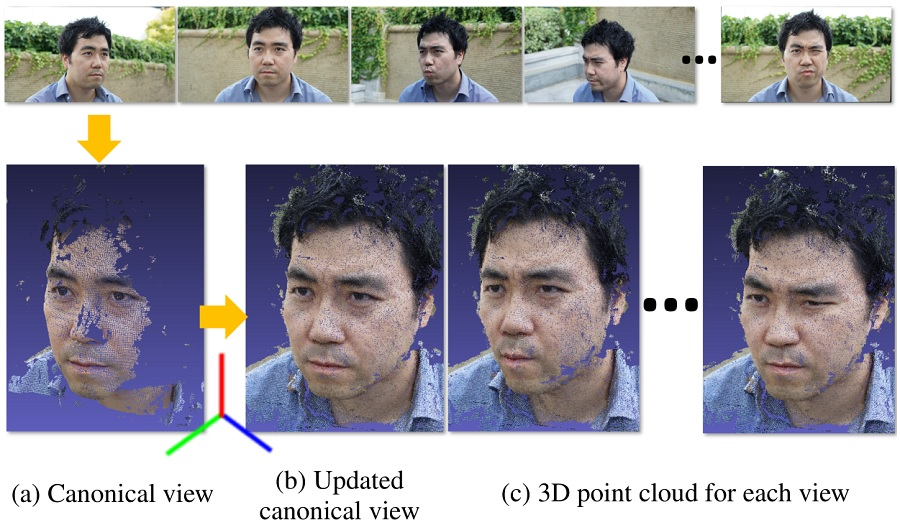
Multi-view Stereo (MVS) is a common solution in photogrammetry applications for the dense reconstruction of a static scene from images. The static scene assumption, however, limits the general applicability of MVS algorithms, as many day-to-day scenes undergo non-rigid motion, e.g., clothes, faces, or human bodies. In this paper, we open up a new challenging direction: Dense 3D reconstruction of scenes with non-rigid changes observed from a small number of images sparsely captured from different views with a single monocular camera, which we call non-rigid multi-view stereo (NRMVS) problem. We formulate this problem as a joint optimization of deformation and depth estimation, using deformation graphs as the underlying representation. We propose a new sparse 3D to 2D matching technique with a dense patch-match evaluation scheme to estimate the most plausible deformation field satisfying depth and photometric consistency. We show that a dense reconstruction of a scene with non-rigid changes from a few images is possible, and demonstrate that our method can be used to interpolate novel deformed scenes from various combinations of deformation estimates derived from the sparse views.