RoutedFusion: Learning Real-Time Depth Map Fusion

PubDate: June 2020
Teams: microsoft
Writers: Silvan Weder Johannes Schönberger Marc Pollefeys Martin Ralf Oswald
PDF: RoutedFusion: Learning Real-Time Depth Map Fusion
Abstract
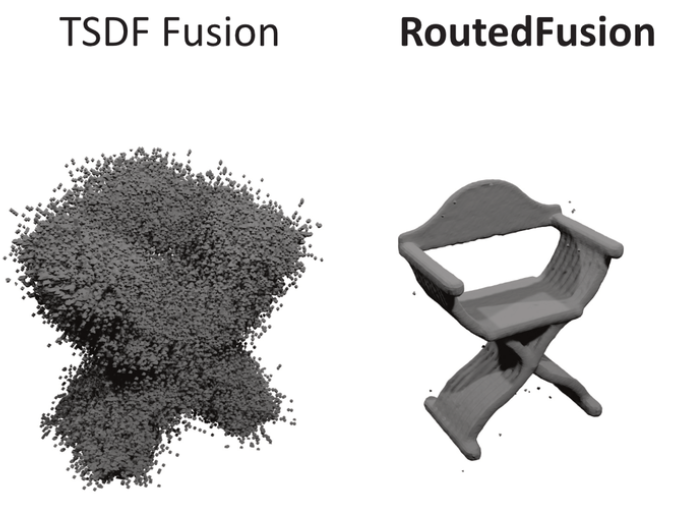
The efficient fusion of depth maps is a key part of most state-of-the-art 3D reconstruction methods. Besides requiring high accuracy, these depth fusion methods need to be scalable and real-time capable. To this end, we present a novel real-time capable machine learning-based method for depth map fusion. Similar to the seminal depth map fusion approach by Curless and Levoy, we only update a local group of voxels to ensure real-time capability. Instead of a simple linear fusion of depth information, we propose a neural network that predicts non-linear updates to better account for typical fusion errors. Our network is composed of a 2D depth routing network and a 3D depth fusion network which efficiently handle sensor-specific noise and outliers. This is especially useful for surface edges and thin objects for which the original approach suffers from thickening artifacts. Our method outperforms the traditional fusion approach and related learned approaches on both synthetic and real data. We demonstrate the performance of our method in reconstructing fine geometric details from noise and outlier contaminated data on various scenes.