Out-of-body Locomotion: Vectionless Navigation with a Continuous Avatar Representation

PubDate: Aug 2020
Teams: University of Nevada
Writers: Navarro Griffin, Nathan Mallku
PDF: Out-of-body Locomotion: Vectionless Navigation with a Continuous Avatar Representation
Abstract
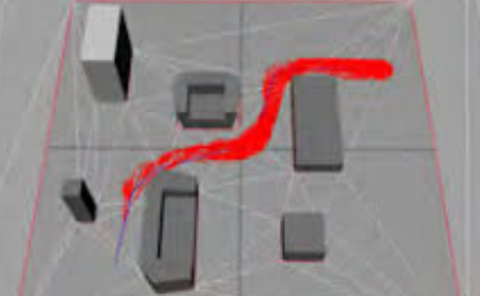
Teleportation is a popular and low risk means of navigating in VR. Because teleportation discontinuously translates the user’s viewpoint, no optical flow is generated that could lead to vection-induced VR sickness. However, instant viewpoint translations and resulting discontinuous avatar representation is not only detrimental to presence and spatial awareness but also presents a challenge for gameplay design–particularly for multiplayer games. With a discontinuous avatar representation it becomes difficult to follow or chase other players. In this thesis we present a new teleportation method called out-of-body locomotion. This is a hybrid viewpoint technique that lets users seamlessly switch between a first-person and third-person avatar view while the user’s avatar has a continuous representation. While in third-person, if the user doesn’t move, the camera remains stationary to avoid any optical flow generation and to minimize VR sickness. In third-person users can precisely navigate their avatar using their controller. The viewpoint automatically switches back to first-person as soon the user breaks line of sight with their avatar or the user requests to rejoin the avatar with a button press. While in first person, users can walk around using positional tracking and switch to third person when they run into the tracking space boundaries. In this study we compare the effectiveness of out-of-body locomotion to regular teleportation using a user study that had participants (n=22) traverse an obstacle courses. We measure VR sickness incidence, usability, spatial disorientation and performance. Results of our study that out-of-body locomotion requires significantly fewer (67%) viewpoint transitions than teleportation, while there was no significant difference in performance. Participants had a significant preference for out-of-body locomotion regarding performance, accuracy, likeability and spatial disorientation. We discuss a number of issues for future work.